|
Jinhyung (David) Park I am a second-year PhD student at CMU's Robotics Institute, advised by Prof. Kris Kitani. I previously received my bachelor's degree in Computer Science at CMU in 2022, also working with Prof. Kris Kitani. Additionally, I had the opportunity to conduct research at the MSC Lab in UC Berkeley for two summers, advised by Prof. Masayoshi Tomizuka and Dr. Wei Zhan. I also worked for a summer at Meta Zurich researching 3D panoptic reconstruction. |
|
ResearchI'm broadly interested in computer vision, joint 2D/3D understanding, and multi-modal learning. Much of my research focuses on bridging 2D and 3D representations for a cohesive understanding of the world. |
|
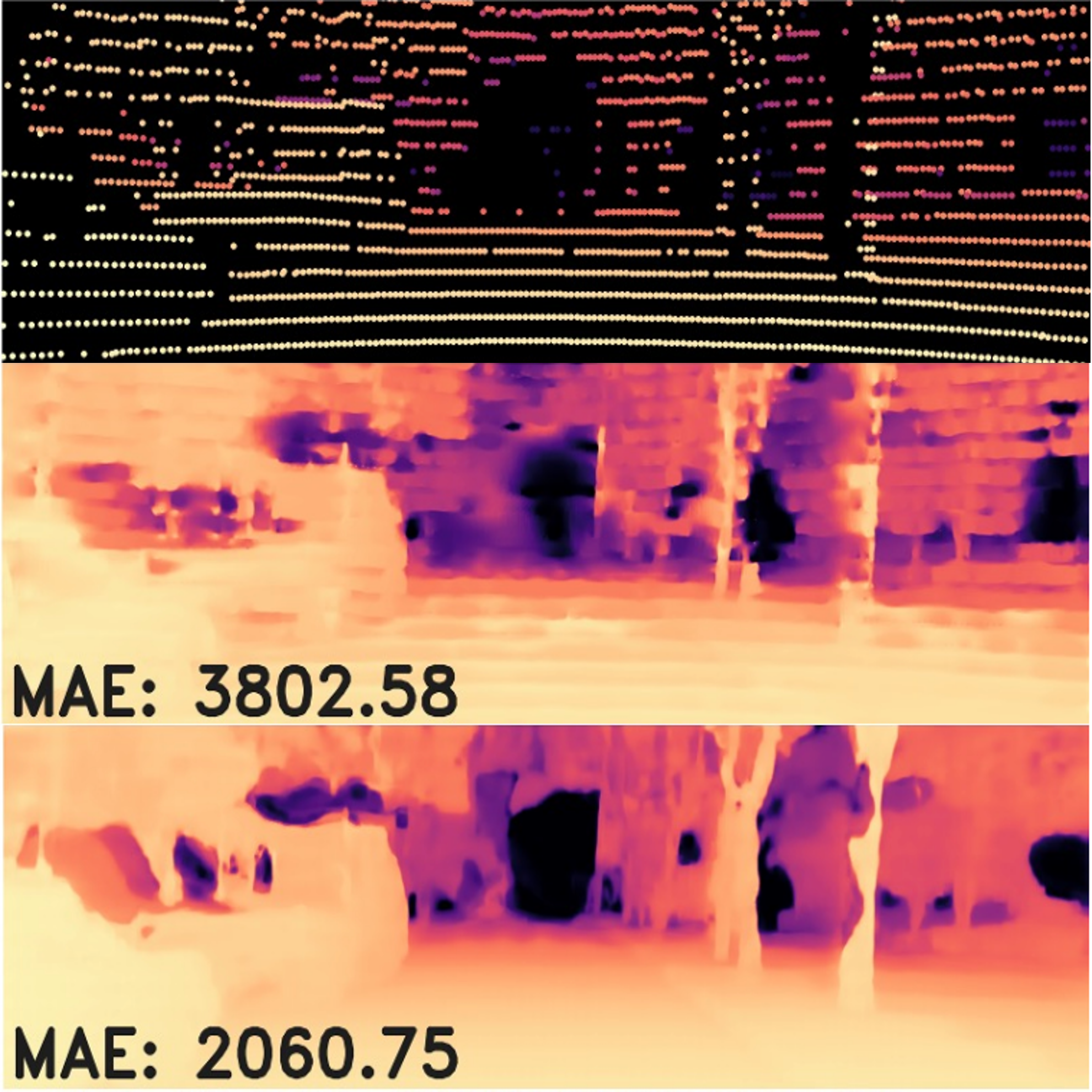
Flexible Depth Completion for Sparse and Varying Point Densities
Jinhyung Park, Yu-Jhe Li, Kris Kitani CVPR, 2024 paper / bibtex Aligning predicted depth maps with observed depth points by propagating depth corrections improves depth completion for sparse and varying input point densities. |
|
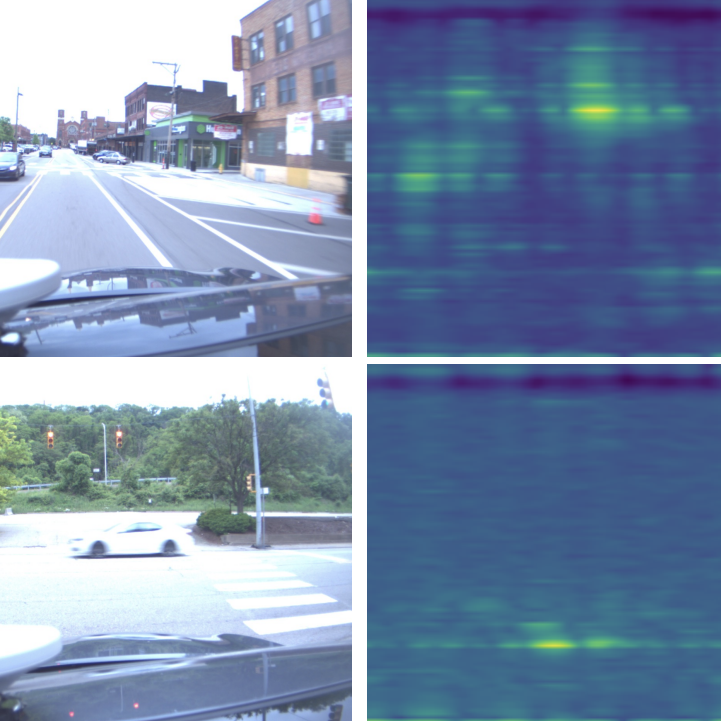
Azimuth Super-Resolution for FMCW Radar in Autonomous Driving
Yu-Jhe Li, Shawn Hunt, Jinhyung Park, Matthew O'Toole, Kris Kitani CVPR, 2023 paper / code / bibtex Super-resolution of radar using raw ADC signals effectively simulates additional receiver antennas and improves downstream detection performance. |
|
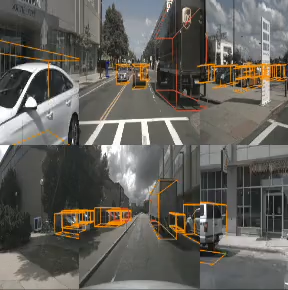
Time Will Tell: New Outlooks and A Baseline for Temporal Multi-View 3D
Object Detection
Jinhyung Park*, Chenfeng Xu*, Shijia Yang, Kurt Keutzer, Kris Kitani, Masayoshi Tomizuka, Wei Zhan ICLR, 2023 (Oral Presentation, Top 5% of accepted papers) paper / code / bibtex Combining long-term, low-resolution and short-term, high-resolution matching for temporal stereo yields efficient and performant camera-only 3D detectors. |
|
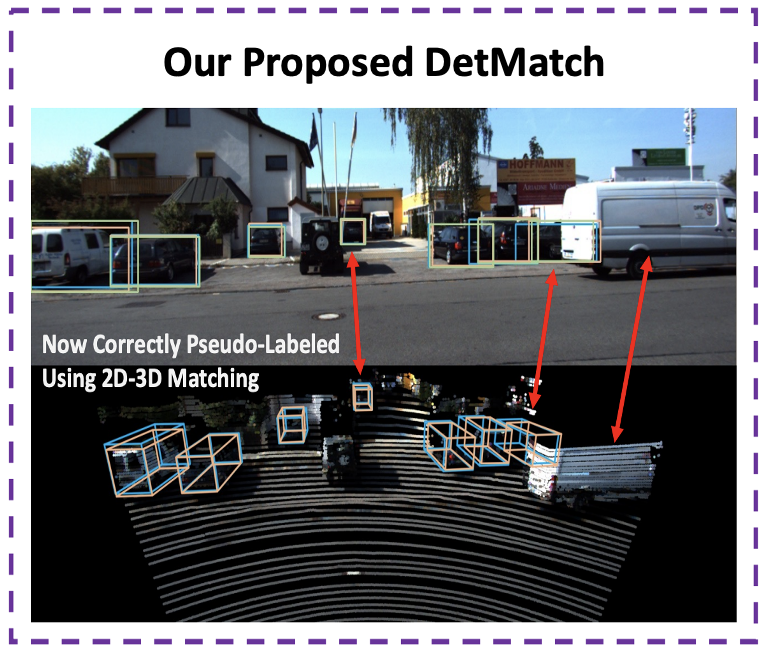
DetMatch: Two Teachers are Better Than One for Joint 2D and 3D
Semi-Supervised Object Detection
Jinhyung Park, Chenfeng Xu, Yiyang Zhou, Masayoshi Tomizuka, Wei Zhan ECCV, 2022 paper / code / bibtex Consistency between 2D and 3D pseudo-labels for joint 2D-3D semi-supervised learning stymies single-modality error propagation and improves performance. |
|
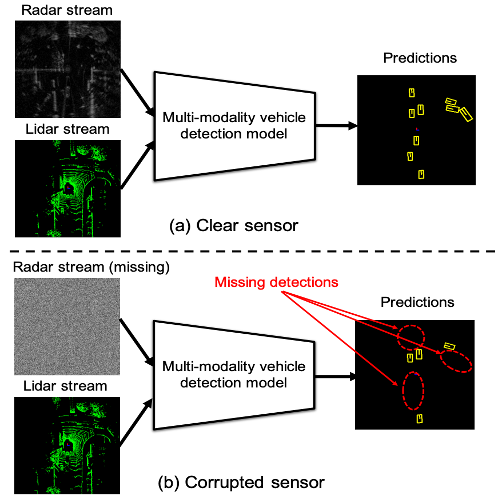
Modality-Agnostic Learning for Radar-Lidar Fusion in Vehicle
Detection
Yu-Jhe Li, Jinhyung Park, Matthew O'Toole, Kris Kitani CVPR, 2022 paper / bibtex Multi-modal fusion with prediction consistency between privileged teacher and noisy student alleivates collapse in difficult capture conditions and improves performance in ideal conditions. |

|
Multi-Modality Task Cascade for 3D Object Detection
Jinhyung Park, Xinshuo Weng, Yunze Man, Kris Kitani BMVC, 2021 paper / bibtex Recursive, cascaded fusion of 2D and 3D representations at the task level improves both 2D segmentation and 3D detection quality. |
|
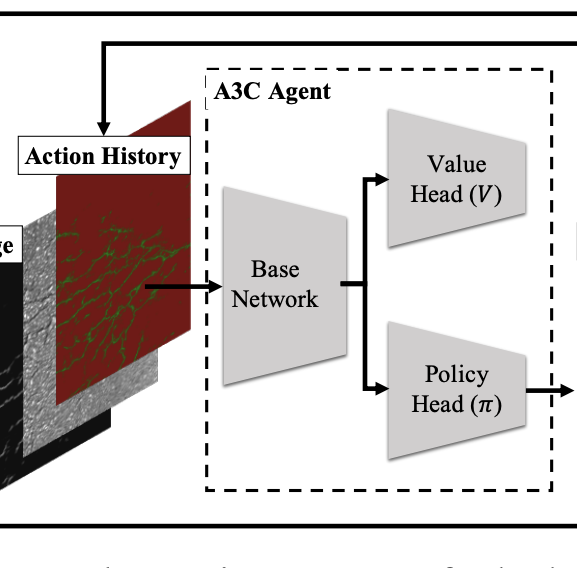
Crack Detection and Refinement Via Deep Reinforcement Learning
Jinhyung Park, Yi-Chun Chen, Yu-Jhe Li, Kris Kitani ICIP, 2021 (Best Industry Impact Award) paper / bibtex Second-stage refinement of segmentation masks through an RL agent iteratively completes and cleans predictions. |
|
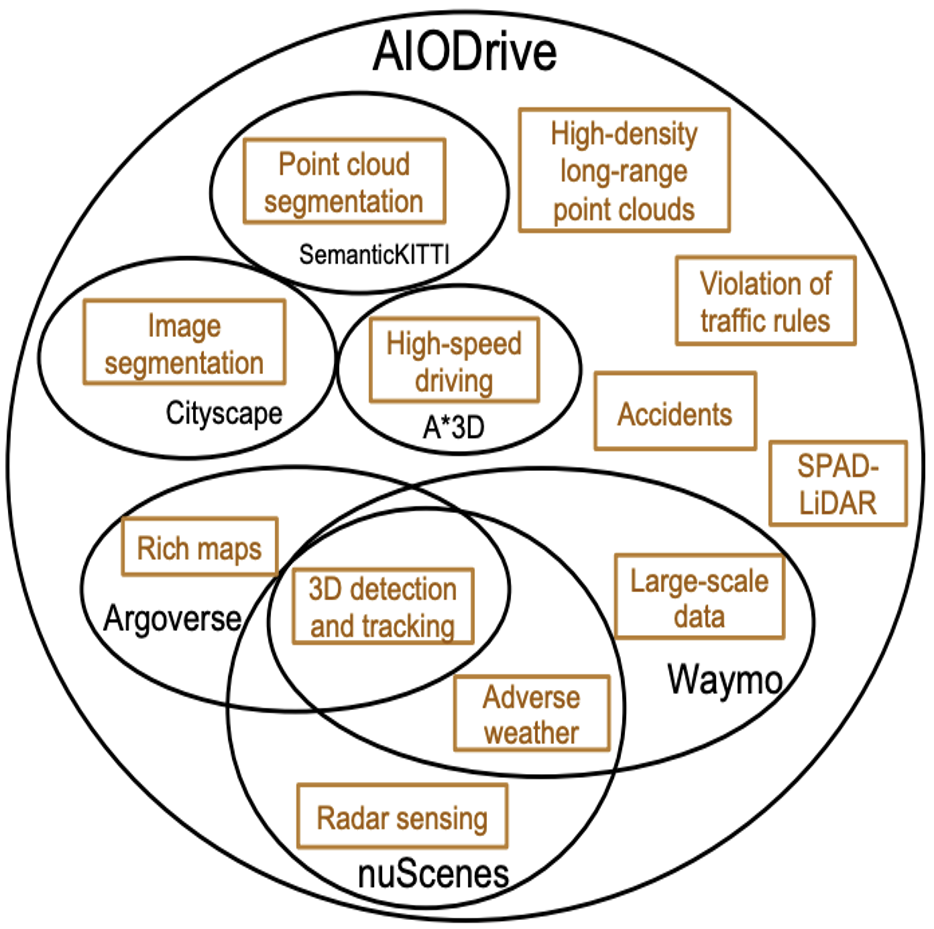
A Large-Scale Comprehensive Perception Dataset with High-Density Long-Range
Point Clouds
Xinshuo Weng, Dazhi Cheng, Yunze Man, Jinhyung Park, Matthew O'Toole, Kris Kitani arXiv, 2021 dataset page / paper / bibtex Large-scale synthetic driving dataset with comprehensive data distribution, sensor suite, and annotations. |
|
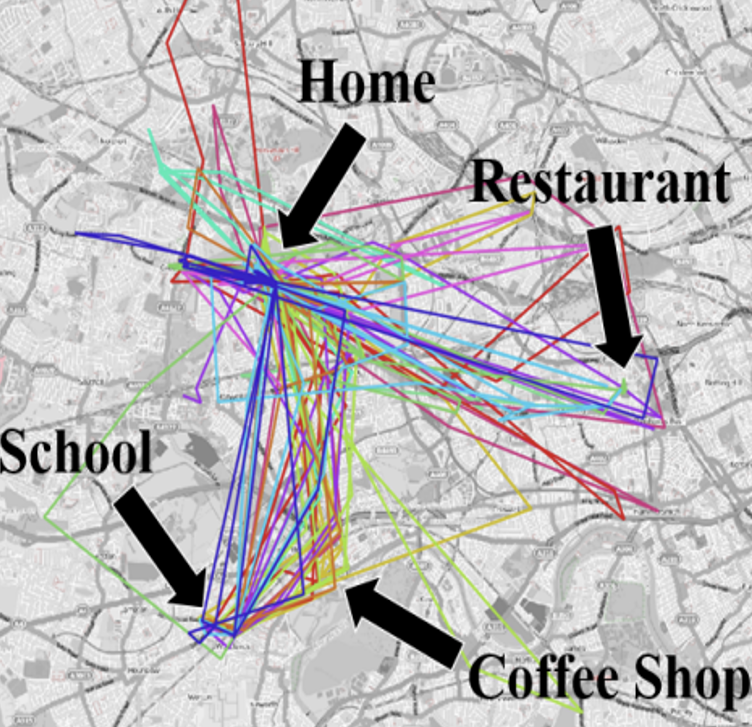
Protecting User Privacy: Obfuscating Discriminative Spatio-Temporal
Footprints
Jinhyung Park, Erik Seglem, Eric Lin, Andreas Züfle SIGSPATIAL LocalRec Workshop, 2017 paper / bibtex Consideration of entropy-based and adversarial obfuscation of user geolocation trajectories for online identity protection. |
|
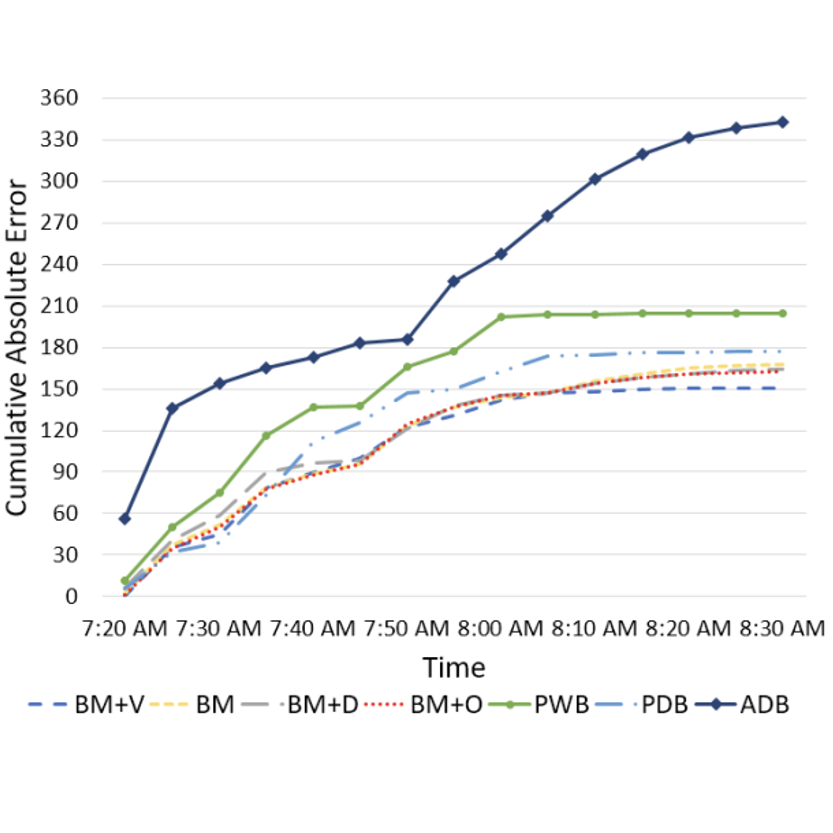
Real-Time Bayesian Micro-Analysis for Metro Traffic Prediction
Eric Lin, Jinhyung Park, Andreas Züfle SIGSPATIAL UrbanGIS Workshop, 2017 paper / bibtex Metro outflow prediction based on estimated distribution of origin-destination station pairs. |
|
Design and source code from Jon Barron's website |